While Sam was working on making the IR sensor work properly I was working with the stepper motor to see how to add weight to get the kind of movement we want for our table.
My first intuition was to use fishing line and bullet weights to create momentum to move the table.
I tried it with one weight...
and I tried it with a lot of weights (and every amount in-between).
Although the video with the most weights looks like it could work none of these seemed to make the motor itself move very much and I was concerned that the extra weight would not only be inconvenient and hard to work with but noisy as well.
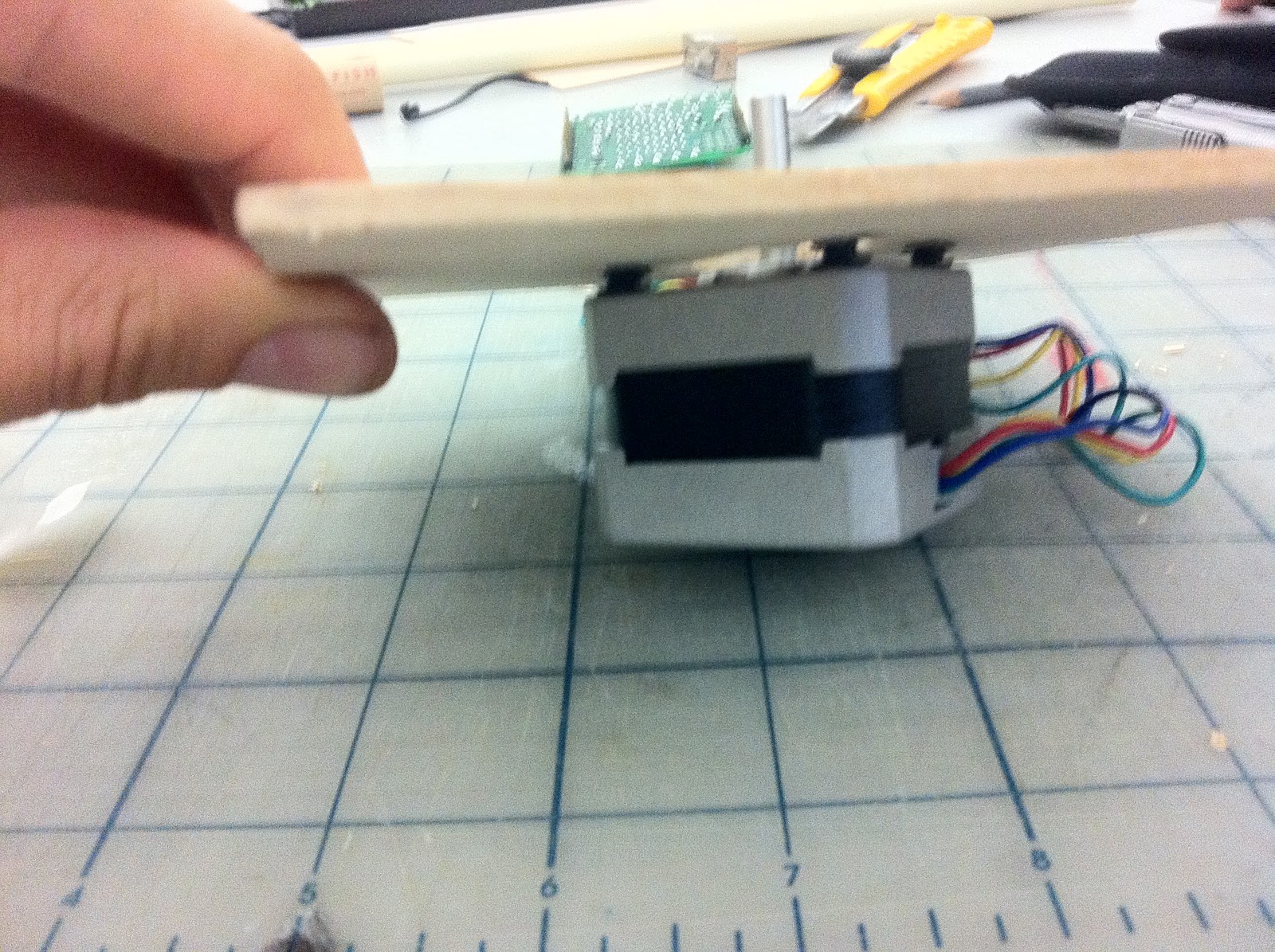
I tried using a balsa wood stick with one bullet weight on each end and VOILA! it worked like a charm.
The next day when Sam and I met he not only had the IR sensor working but had put together code that randomized the motor's movement.
Our next step was to figure out how to attach the motor to the table. We currently have the motor mounted to a piece of wood which we might screw or velcro (for easier access) to a hole we will make in the bottom of the table.
screws and spacers

from the top
from the side

from the bottom, the velcro would go in each corner of the board
Once we attach the motor we can start messing with the code to make sure it affects the table just the way we want it to.
Sensoratiously yours,
Dan
No comments:
Post a Comment