Uses in the real world!
The ultrasonic rangefinder sensor are used to detect targets within the context of industry or medicine, for instance. They are used within medical probes and also within automated factory machinery.
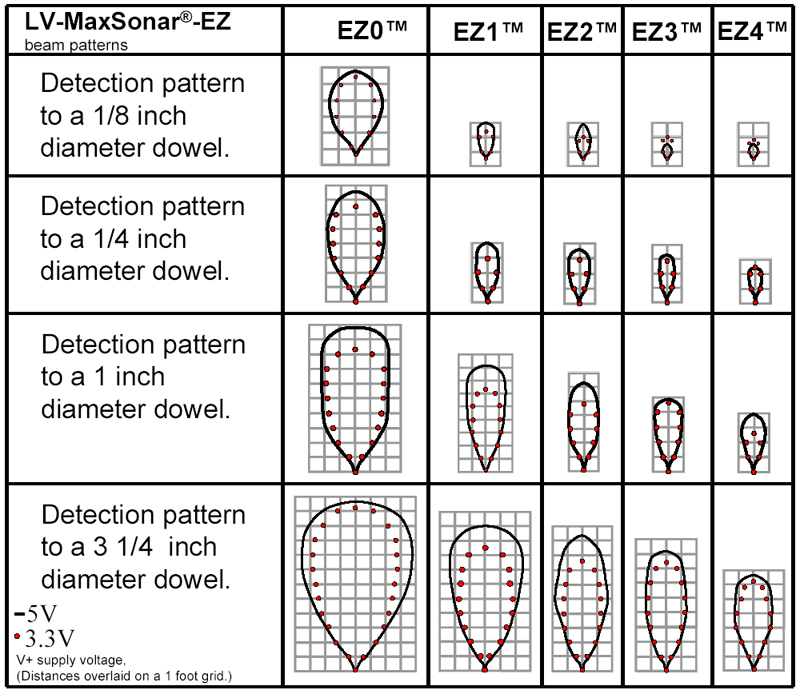
As you can tell by the diagram, the EZ0 MaxSonar sensor has a wide range of detection relative to the size of the "dowel" or target which it is sensing (in our case this would be viewers). Whereas the EZ 3 and 4 have narrower ranges of detection, which would be more preventative of interference or unwanted targets, which would fall outside of the cone with the EZ3. Thus, we would rather use the EZ3 sensor.


The default way the sensor works with most code we found, is that when you get in range of the sensor, the LED turns on. Yet, we want to do the opposite, where the light is initially on and when you get in range it turns off. We also want to incorporate the use of PWM, so that there's a gradation of intensity of the light of the LED.
Breakdown:
1. LED is on when no one is in range
2. Viewer barely enters cone range of sensor and the light dims slightly
3. Viewer walks closer to the piece, and the light dims more as they walk closer
4. The LED is completely unlit when the viewer is closest to the piece
Sample schematic we used to create videos below:
Testing Our EZ3 Sensor!
Tried with original coded distance of 20 cm
Changed coded distance to 2 ft
Changed coded distance to 8 ft
No comments:
Post a Comment